2.PWM
Un segnale PWM (Pulse Width Modulation ovvero modulazione a variazione della
larghezza d'impulso) è un' onda quadra di duty cycle variabile che permette
di controllare l'assorbimento (la potenza assorbita) di un carico elettrico(nel
nostro caso il motore DC), variando (modulando) il duty cycle.
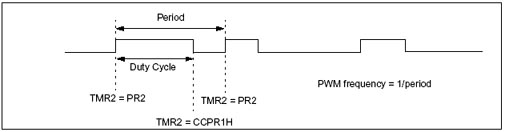
Figura 5: Definizione di duty cycle
Un segnale PWM è caratterizzato dalla frequenza (fissa) e dal duty cycle
(variabile); come si deduce dalla Figura 5, il duty cycle è il rapporto
tra il tempo in cui l'onda assume valore alto e il periodo T (l'inverso della
frequenza: T=1/f) ne segue che un duty cycle del 50% corrisponde ad un'onda
quadra che assume valore alto per il 50% del tempo, un duty cycle dell'80% corrisponde
ad un'onda quadra che assume valore alto per l'80% del tempo e basso per il
restante 20%, un duty cycle del 100% corrisponde ad un segnale sempre alto e
un duty cycle dello 0% ad un segnale sempre basso (come vedremo anche questi
ultimi due casi non sono del tutto inutili).
Ora è necessario capire come applicare il segnale PWM al ponte H per
controllare il motore, esamineremo due modalità: il PWM sign-magnitude
e il PWM locked anti-phase.
2.1 Sign-Magnitude PWM
Come è possibile vedere dallo schema di figura 6, il pilotaggio SM (Sign-Magnitude) consiste nell'inviare il segnale PWM all'ingresso di enable del ponte e di comandare la direzione di rotazione del motore tramite i due ingressi di controllo. Tali due ingressi devono essere comandati da segnali invertiti; utilizzando un inverter come nello schema di figura 6 si riduce il numero di pin del microcontrollore necessari per il controllo.
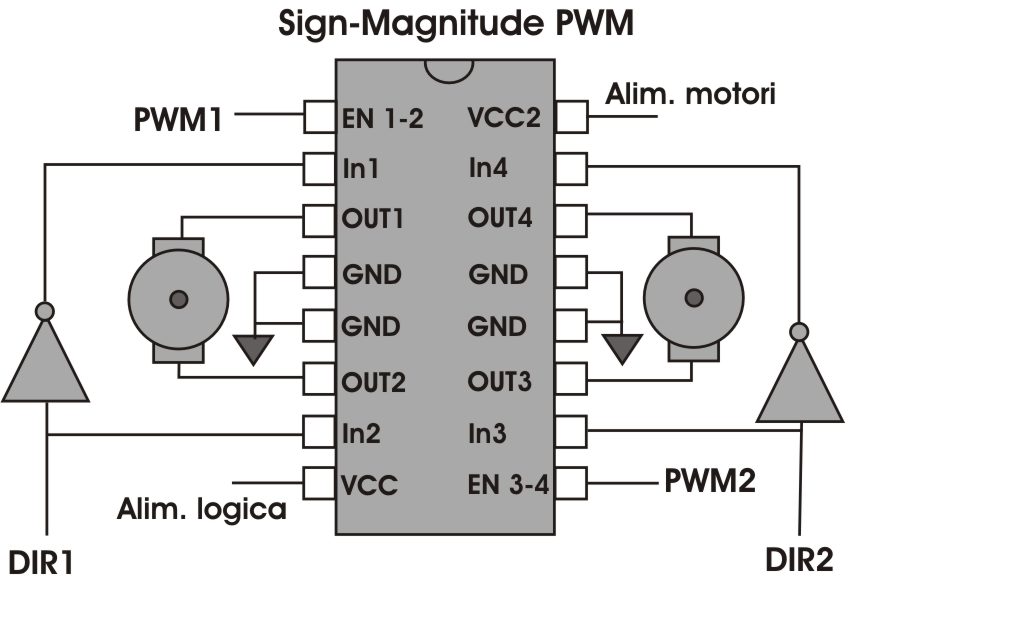
Figura 6: Sign-Magnitude PWM
Per il controllo SM sono necessari quindi due segnali: il primo è un'onda
quadra di duty cycle variabile tra 0 e 100% che stabilisce la velocità
di rotazione, il secondo è un segnale costante che determina il verso
di rotazione (segnale basso rotazione in un verso, segnale alto rotazione nell'altro
verso).
2.2Locked Anti-phase PWM
Il controllo LAP (locked anti-phase) si basa sulla stessa configurazione circuitale del controllo SM tuttavia i segnali di comando sono applicati in modo diverso, come è possibile vedere in figura 7.
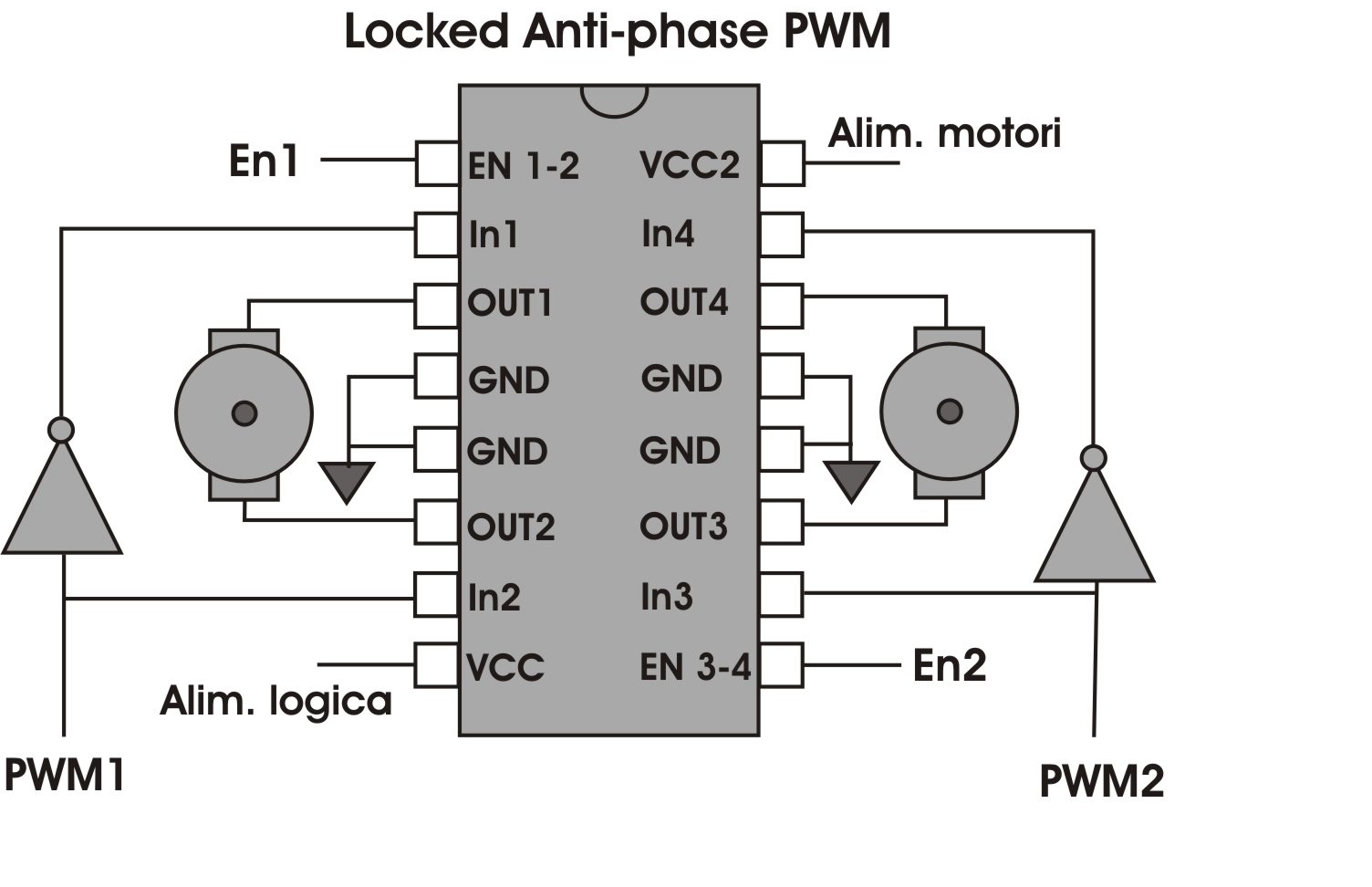
figura
7: Locked anti-phase PWM
In questo caso il segnale PWM viene messo in ingresso all'invertitore in modo
da avere ai due lati opposti del ponte due segnali invertiti tra loro; agendo
sull'enable è possibile spegnere il rispettivo ponte.
Per il controllo LAP può bastare anche solo un segnale di comando (l'enable
può essere fissato alto se non necessario) infatti l'onda quadra stabilisce
sia la velocità che il verso di rotazione nel seguente modo:
1.Duty cycle a 0% : rotazione alla massima velocità
in un verso
2. Duty cycle al 50%: motore fermo
3.Duty cycle al 100%: rotazione alla massima velocità
nell'altro verso
Sezione
3: Scheda controllo motori